SprutCAM Updates its Free Robot Calibration App -- 14 Robot Manufacturers Now Supported
SprutCAM Tech's Robot Calibration mobile app is designed to accurately calibrate the Tool Center Point (TCP) and automatically transfer the data to SprutCAM X Robot via a smartphone.
Tool Center Point (TCP) calibration is a process used in robotics to determine the position of a tool relative to the robot's arm or body. This information is critical to ensuring the accuracy of the robot's movements and the precision of its tool operations.
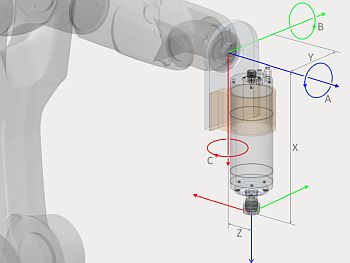
The goal of TCP calibration is to find the exact position of the tool tip, which can then be used as a reference point for the robot's motion control system. This allows the robot to consistently and accurately perform tasks such as cutting, drilling and welding in the correct location.
The calibration process typically involves measuring the positions of various points on the tool and using these measurements to calculate the position of the TCP.
The original version of the application only worked with the robots of three well-known manufacturers. The latest version of SprutCAM Tech's Robot Calibration app now supports TCP calibration for the following robot brands: FANUC, Kuka, CRP, Denso, Dobot, Estun, Hiwin, Hyundai, Motoman, Newker, Manutec, Nachi, OTC Daihen and Turin.
The Robot Calibration mobile app provides SprutCAM X Robot software users with the following benefits:
- Elimination of errors caused by manual data entry.
- Reduced robot debugging time.
- No need for expensive calibration tools or services.
- Ever-growing list of supported robots and mechanisms.
- The engineer interacts with the robot using a standard smartphone.
Want more information? Click below.
Rate this article
View our terms of use and privacy policy